企画セッション:自然言語処理への機械学習の応用 (09:30 – 11:30)
深層学習と自然言語処理 [スライド]

講演者:鶴岡 慶雅(東京大学)
概要:自然言語処理では、任意長の系列を扱う必要から、 LSTM や GRU を用いたリカレントニューラルネットワークが、品詞タグ付けや構文解析といった基盤的な言語解析処理から、機械翻訳や文書要約、質問応答といった応用まで、幅広く利用されている。本講演では、そのような深層学習を利用した自然言語処理技術について概観するとともに、自然言語からのプログラム生成といった、近年注目を集めている新たなアプリケーションについて述べる。また、それらを高精度で実現するための技術として、ポインターネットワーク、マルチタスク学習、強化学習などによるアプローチについても簡単に紹介する。
音声対話アシスタントに関する最近の研究動向とYahoo! JAPAN研究所での取り組み [スライド]

講演者:鍜治 伸裕(ヤフー株式会社 )
概要:近年、アマゾンのAlexaやマイクロソフトのCortanaといった、いわゆる音声対話アシスタントが大きな注目を集めている。これに伴い、オープンドメインなユーザ発話の意図解析や大勢のユーザとのインタラクションなど、大規模な対話サービスが実用化されていなかった時代には看過されていた技術課題が浮き彫りになりつつあり、現在、それらの解決に向けた取り組みが活発に行われている。本発表では、自然言語処理分野での取り組みを中心として、音声対話アシスタントに関連する最近の研究事例を、Yahoo! JAPAN研究所での取り組みを交えながら紹介する。
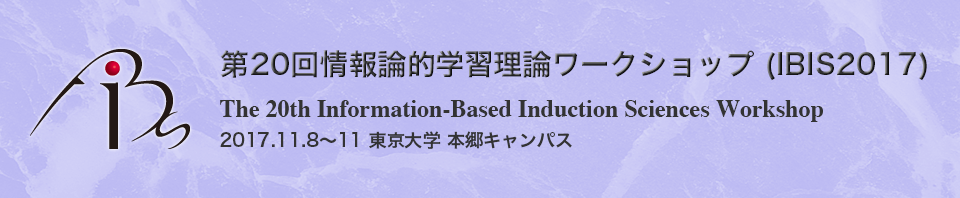
ニューラル機械翻訳の動向 [スライド]
講演者:中澤 敏明(科学技術振興機構(JST) )
概要:2014年にニューラル機械翻訳(Neural Machine Translation, NMT)が登場して早3年が経過した。これまでNMTに関する数多くの研究が発表され精度も向上していったが、一方で低頻度語に弱かったり、過不足なく翻訳することができなかったりなど、いまだに解決されていない問題も存在する。最近では日本でもNMTを実用化する動きが加速しているが、これらは実用上大きな問題である。本発表ではNMTの仕組みを簡単に解説し、現状の翻訳精度や課題について述べる。また科学技術振興機構におけるNMTの実用化事例を紹介する。
企画セッション:実社会への機械学習の応用 (16:00 – 18:00)
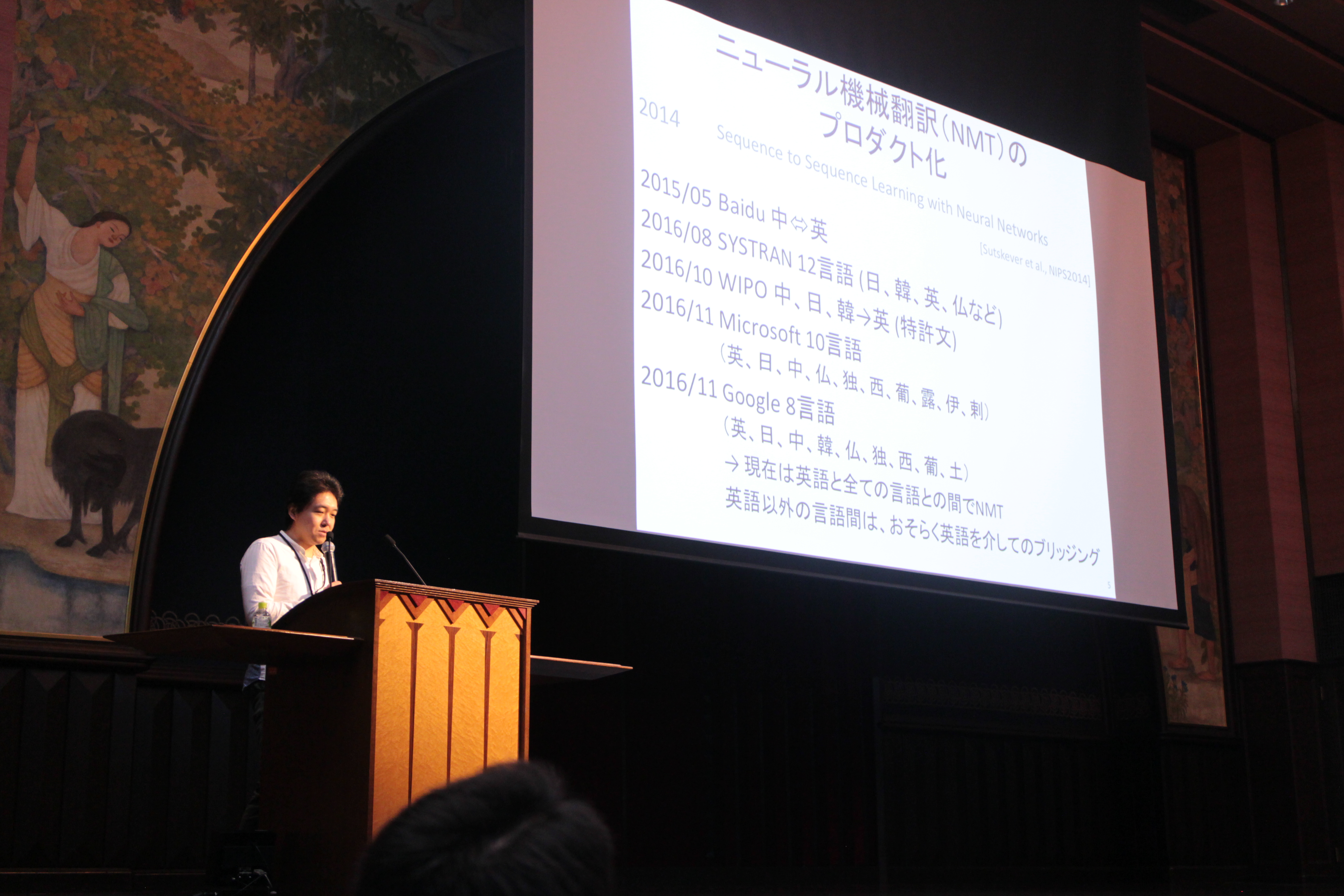
自動車の自律化におけるロボティクスと学習
講演者:竹内 栄二朗(名古屋大学 )
概要:近年数多くの自動運転車両が開発され、google等は数百万キロもの公道での自律走行を実現している。これらの実現にはDARPA Urban challenge等の自律走行チャレンジに関わった多くのロボット研究者らが貢献している。これら自律走行車両の多くは環境やセンサ、車両等をモデル化し制御を行う手法が一般的に取られる。一方、近年の深層学習の研究の活発化に伴い、Nvidia社らがEnd-to-End学習によるレーン追従走行を実装するなど、全体のモデル化を行わず大量のデータから運転技能を学習する取り組みも活発化してきている。ここでは自動車の自律化に焦点をあて、我々が行ってきた従来のロボティクスにおけるアプローチや、大量の運転データによるドライバモデル構築、学習による制御への取り組みについて報告し、学習による運転技能の獲得の展望について議論する。
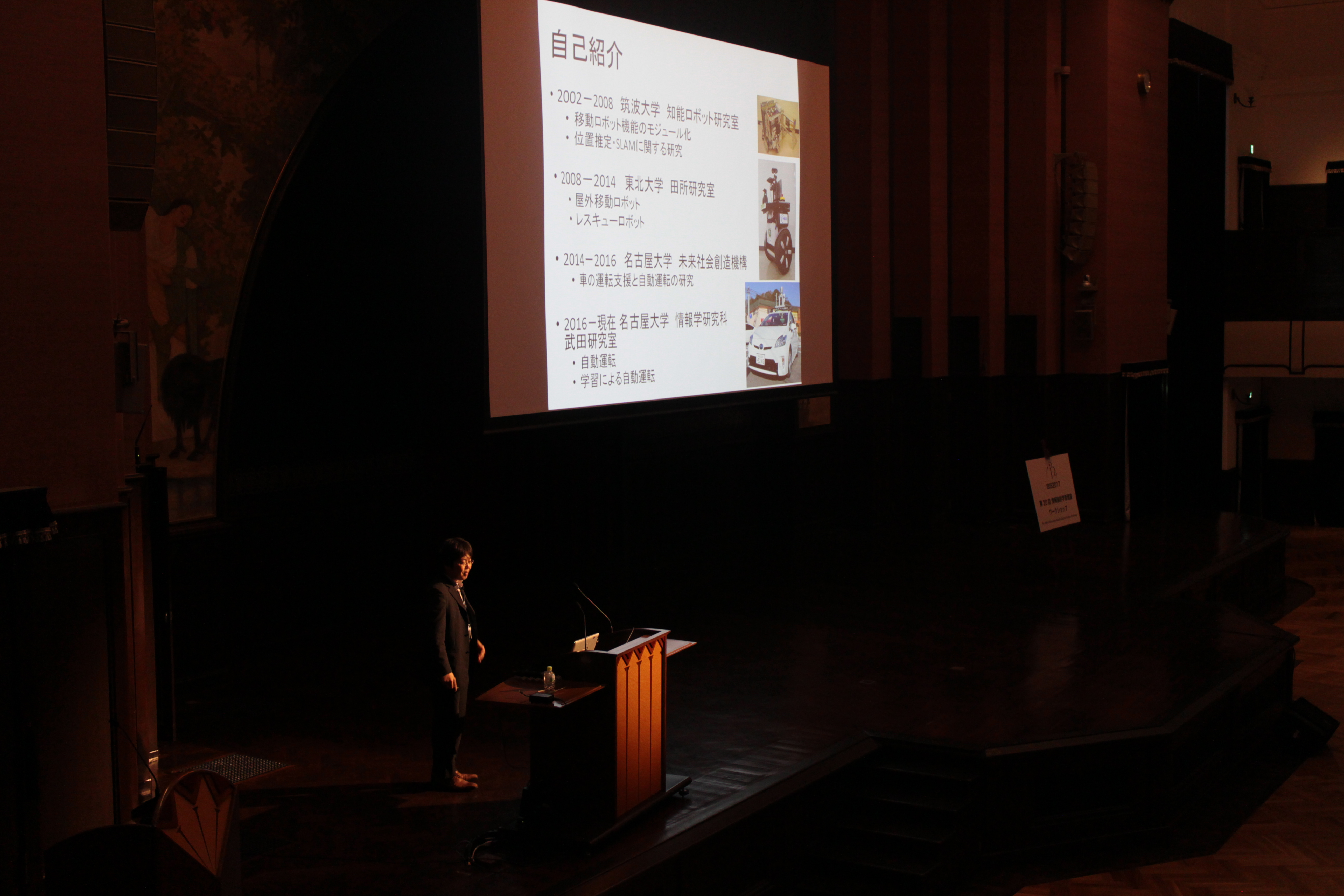
実社会・実環境におけるロボットの機械学習 [スライド]
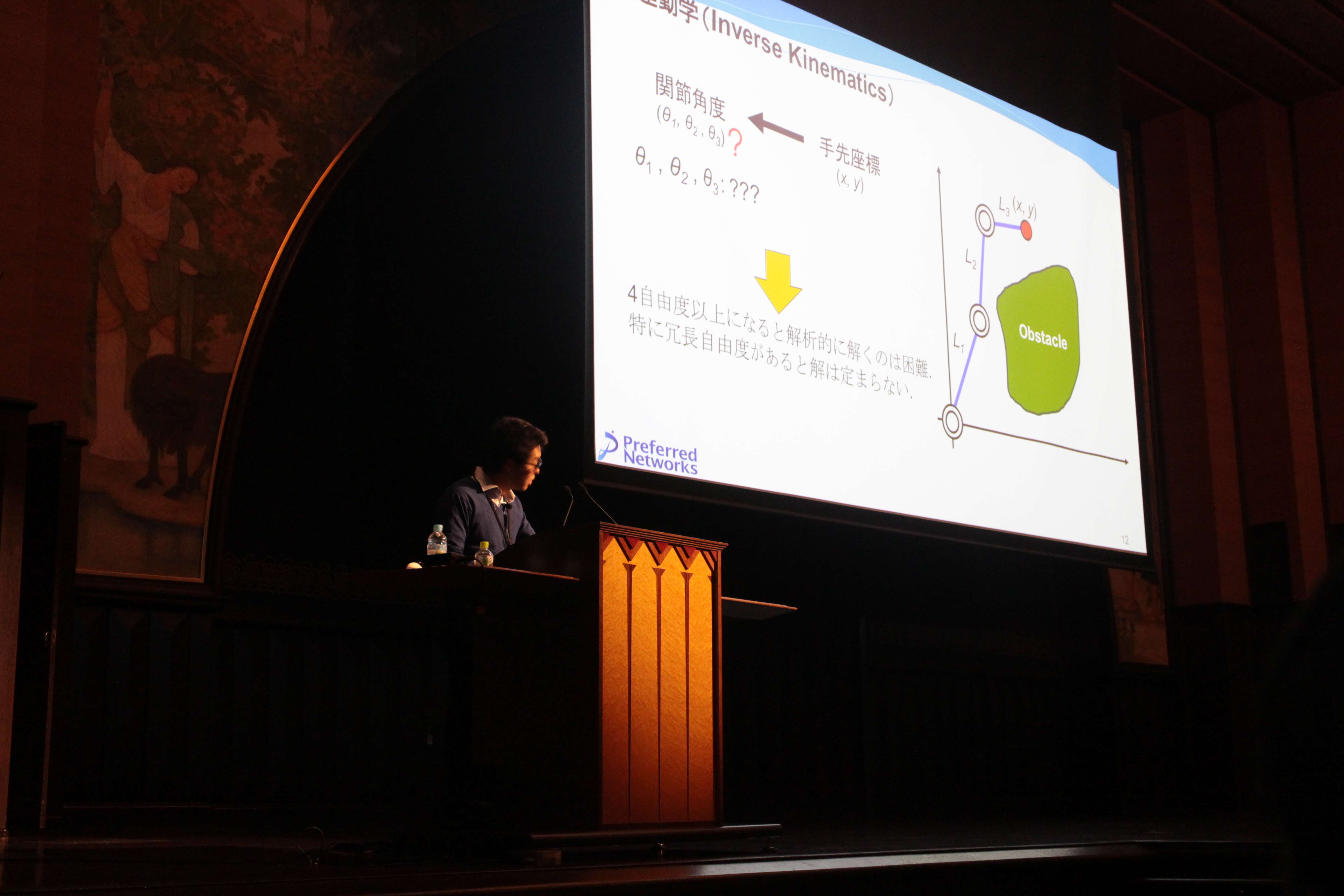
講演者:高橋 城志(Preferred Networks, Inc. )
概要:本講演では実社会・実環境で動作しているロボットに機械学習がどのように利用されているのかを紹介する.従来のロボットの制御方法での課題に対する現在の産業界での取り組み,さらに,今後どのようなタスクが求められ,それに対して最先端の機械学習研究をどのように応用していくのか,について具体的な事例を交えながら解説する.
マルチモーダルカテゴリゼーション:階層ベイズモデルに基づくロボットによる概念・言語獲得 [スライド]

講演者:中村 友昭(電気通信大学 )
概要:我々はこれまで,ロボットによる概念・言語を獲得するための階層ベイズモデルを構築してきた.本研究における概念とは,ロボットがセンサから得られるマルチモーダル情報をクラスタリングすることで形成されるカテゴリであると定義する.さらに,他者とのインタラクションを通して得られる言語情報から,ロボットが語意や文法の獲得が可能である.本講演では,これまで我々が構築してきた階層ベイズモデルに基づくロボットによる概念・言語獲得に関する研究を紹介する.